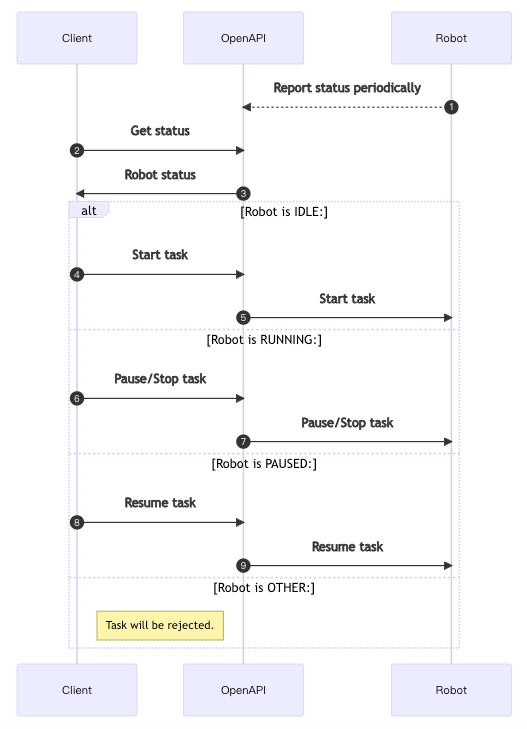
接口文档RobotTaskServiceMTriggerRemoteTasks触发远程任务 当你的机器人处于不同任务状态时,可以使用机器人开放API触发远程任务。 机器人在状态变化时定期报告状态信息。 通过序列号查询机器人状态。 返回机器人状态,包括任务状态、清洁模式、可执行任务和地图信息等。 当机器人空闲时,以清洁模式、任务名称和地图名称启动远程任务。 异步发送命令。 当机器人运行时,暂停/停止当前远程任务。 异步发送命令。 当机器人空闲时,以清洁模式、任务名称和地图名称恢复远程任务。 异步发送命令。 当机器人空闲时,任务将被拒绝。